

实验原理
弹簧在外力的作用下产生形变(伸长或缩短),在弹性限度内,弹簧的伸长量Δx与所受拉力的大小F成正比,即:F=kΔx,这就是胡克定律,式中的比例系数k称为弹簧的倔强系数,它的值与弹簧的形状有关。如果知道弹簧相应的伸长量或缩短量Δx,以及施加的外力F就可以根据胡克定律计算出k的值。
本实验所使用的仪器如图1所示。弹簧铅直地悬挂在一个稳定的支架上,弹簧的自由端挂钩上悬挂着质量为M1的物体(在弹性限度内),弹簧自身的质量为M0,这样弹簧和物体构成了一个弹簧振子。如果在弹簧上施加一个在弹性限度以内的外力,比如说增加一个重量为m的物体,弹簧就会有一定的伸长量Δx,利用卡尺小镜上的刻度,我们可以测量出弹簧的位移量。
![]()
![]()
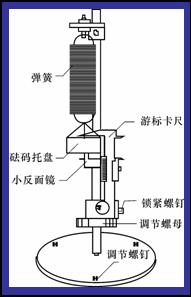
图1 实验装置示意图
如果给弹簧振子增加一个外力,使物体离开平衡位置少许,当作用在弹簧上的外力撤消后,弹簧振子将在平衡位置附近作简谐振动,它的运动方程为
![]()
![]()
该方程的解为:
![]()
式中的![]() ,由此我们可以得到系统的振动周期为:
,由此我们可以得到系统的振动周期为:
![]()
![]()
只要测出弹簧振子的振动周期,就可以计算出弹簧倔强系数
![]() 值。同样若已知弹簧的倔强系数
值。同样若已知弹簧的倔强系数
![]() ,测出弹簧振子的振动周期,也可以计算出弹簧的有效质量。
,测出弹簧振子的振动周期,也可以计算出弹簧的有效质量。
用霍尔传感器测量弹簧振子振动周期的测量原理如图2所示:
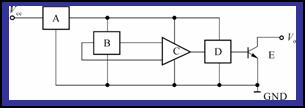
图2 霍尔传感器测量弹簧振子振动周期的测量原理
集成开关型霍尔传感器是由稳压器A,霍尔电压发生器B(霍尔片),差分放大器C,施密特触发器D和OC门输出E五个基本部分组成。其工作过程是:从输入端输入电压V
![]() ,经稳压器稳压后加到霍尔片两端。处于磁场中的霍尔片时,会在与外加电压和磁场相垂直的方向上产生霍尔电势差
,经稳压器稳压后加到霍尔片两端。处于磁场中的霍尔片时,会在与外加电压和磁场相垂直的方向上产生霍尔电势差
![]() ,
,
![]() 经差分放大器放大后被送至施密特触发器D整型成方波,然后输送到OC门E输出。
经差分放大器放大后被送至施密特触发器D整型成方波,然后输送到OC门E输出。
图3显示了集成开关型霍尔传感器工作曲线,未加磁场前,触发器输出低电位,开关呈 “关”状态。当施加的磁场达到工作点(B
![]() )时,开关呈 “开”状态。继续增加磁场,器件将保持“开”状态。当减小磁场到低于B
)时,开关呈 “开”状态。继续增加磁场,器件将保持“开”状态。当减小磁场到低于B
![]() 时,由于磁滞作用,器件将继续保持“开”状态,直到施加的磁场减小到“释放点”(B
时,由于磁滞作用,器件将继续保持“开”状态,直到施加的磁场减小到“释放点”(B
![]() )时,触发器才会翻转。由于在磁滞范围内,输出电压
)时,触发器才会翻转。由于在磁滞范围内,输出电压
![]() 是不变的,因而开关的输出稳定、可靠。这是集成霍尔开关型传感器的优良特性之一。
是不变的,因而开关的输出稳定、可靠。这是集成霍尔开关型传感器的优良特性之一。
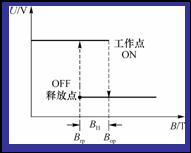
图3 集成开关型霍尔传感器工作曲线