
项目成员:2015214103班陈德智、邹智星,指导教师:杨胡江、陈政委

视频简介
设计原理与方法:
在对机械摆系统的研究时,由于摩擦阻力的影响,无法长期稳定摆动,因此只有一些仿真实验研究了一些机械摆在无阻尼的状态下的一些复杂行为,实际的实验系统研难以实现。因此,研究机械摆的复杂运动规律,必须施加周期性驱动力,才能研究系统的受迫振动特性。但是,由于摆球始终处于运动中,难以对其直接施加周期性的驱动力。因此,本实验将以单摆、弹簧摆为例,通过惯性力的方式,对运动中的机械摆施加周期性的驱动力,研究此状况下机械摆系统的动力学特性。
1、周期性外力的实现
驱动装置主要由滑台、连杆和驱动轮组成,如图1所示。滑台可在水平方向左右滑动,通过连杆与驱动轮连接。连杆长L,一端偏心固定在驱动轮上,固定点离驱动轮中心的距离为R。驱动轮顺时针转动,可通过连杆带动滑台左右移动。滑台滑动的幅度可通过改变R的大小来调节。
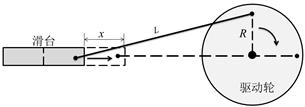
图1 实验装置力学部分几何示意图
设固定点转动到驱动轮正上方时为时间零点,此时滑台的位置为,则此后滑台位置为,

其中,wD是驱动轮的转动圆频率。在实验中,可近似认为 ,则
,则

以滑台为非惯性参考系,其上的机械摆可看作受到了一个周期性惯性力的作用,其大小为

到此,我们建立了一个振动系统,在其上安装机械摆,可等效为周期驱动机械摆,可研究机械摆在周期驱动作用下的动力学特性。
2、驱动弹簧摆动力学方程
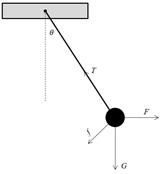
图2 单摆受力分析图
如图2,在轻质细绳下面挂一个小球,可看作质点,绳子不可伸长。设小球质量为m,阻尼系数为g,系统受到的一水平方向周期驱动力。则单摆的动力学方程为

化简可得

为进行matlab仿真可令 ,
, 则有
则有


同时,通过查阅相关资料可知,单摆的周期随振幅的公式在一定条件下可近似为
即单摆周期随振幅增大而增大,固有频率随振幅增大而减小。
3、周期力驱动下弹簧摆弹簧摆动力学方程
如图,在轻质弹簧下面挂一个小球,可看作质点,弹簧的质量忽略不计,便组成一个弹簧摆系统。
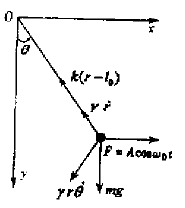
图三 弹簧摆受力分析图
设小球质量为m,弹簧原长为l0,倔强系数为k,在所研究的范围内遵从虎克定律,并且假定弹簧摆在运动过程中不会弯曲。则极坐标下小球受力如图一;

其中k(r-l0)为弹性恢复力;γ 、γr
、γr 分别为小球在r方向
分别为小球在r方向 方向受到的空气阻力,γ为阻尼系数;mg为重力;
方向受到的空气阻力,γ为阻尼系数;mg为重力; 为弹簧摆系统受到的一水平方向周期驱动力;
为弹簧摆系统受到的一水平方向周期驱动力;
为进行matlab仿真,可令 ,
, ,
, ,
, ,
,
则方程可化为以下

实验仪器与装置:
1、周期性驱动的实现:
使用步进电机使杆推动小滑块前后运动,通过小车参考系所受的惯性力,作为弹簧摆的驱动力。通过改变杆连接孔距离电机中心的距离以及电机的转动频率改变驱动力的大小。为能调节杆的改变转向的频率以及转动速度,将步进电机与步进电机驱动器连接,并通过电脑改变步进电机的输入信号频率。
实验装置如下图所示:
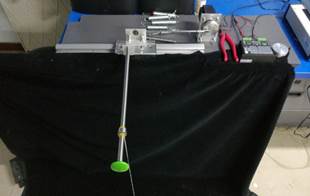
图四 试验装置力学部分实物图
周期力驱动单摆的实现
我们在不同长度的轻质细线下端悬挂一个质量为121g的铁球,通过连接杆与受步进电机驱动的滑块连接。杆上端用绿色标志标记,球使用红色喷漆处理,便于后续的图像识别。
周期力驱动单摆的实现
我们在劲度系数为0.0025N/mm,原长为13cm的弹簧末端悬挂一个质量为121g的铁球,通过连接杆与受步进电机驱动的滑块连接。
4、Labview程序:
(1)驱动部分:通过采集卡连接电机与计算机,通过计算机控制电机转动频率,实现驱动力频率可控。
(2)频率自动调节:实现自动调整电机频率,避免因频率改变太大使得摆球稳定时间过长。
(3)图像识别:通过摄像头采集图像并采集图像中绿色标志物以及红球的中心点坐标。
(4)信号收集:收集从图像识别功能中读取的坐标。
(5)时序图与相图绘制:绘制小球的坐标随时间的变化曲线以及小球当前时刻与下一时刻的相图,用于判断小球此时的状态。
(6)数据写入:将labview程序中读取的数据存入txt文件,便于matlab的进一步分析处理。
数据测量与分析:
(1)阻尼系数测量
竖直状态下的阻尼振动
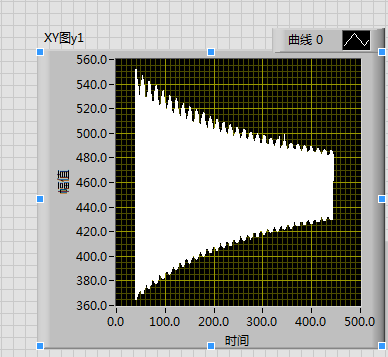
图五 弹簧摆阻尼振动时序图
通过测量半衰期为344.1s,可以得到阻尼系数为0.0029。
(2)周期力驱动下单摆的幅频特性测量
通过查阅相关的资料,我们发现在摆球幅值较大时,单摆的周期将不再是一个固定值。因此我们通过改变孔距中心的距离改变驱动力的大小,从而改变单摆的振幅,通过测量单摆的共振频率是否改变观测单摆固有周期的变化。
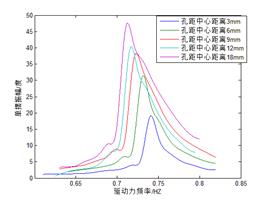
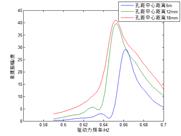
图六 单摆在短绳(50cm)受不同周期性驱动力的幅频特性曲线
由上图可知,在不同的孔距大小时,单摆的共振频率也将发生变化,即单摆的固有频率发生改变。且随着单摆振幅的增大,单摆的固有频率减小。为验证这一结论,我们改变了摆长的大小,绘出不同摆长单摆固有频率随振幅的变化曲线如下。
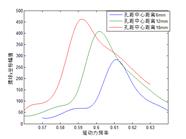
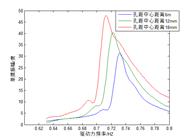
图七 长绳(70cm) 图八 中绳(60cm) 图九 短绳(50cm)
通过以上图像可知,对不同摆长的单摆,其固有频率均随着振幅的增大而减小。
(3)弹簧摆的幅频特性测量
通过查找文献我们发现周期力驱动下的弹簧摆具有非线性动力学特性,因此我们直接测量了某一频率下弹簧摆的双稳态特性如下图,同时通过增加驱动力频率和减小驱动力频率两种方式绘出的弹簧摆的幅频特性曲线。此时孔距电机中心的距离为2mm。
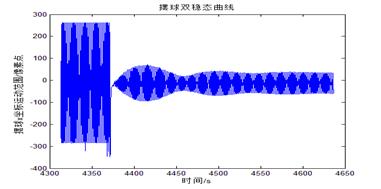
图十 弹簧摆在3mm孔距0.658Hz的双稳态时序图
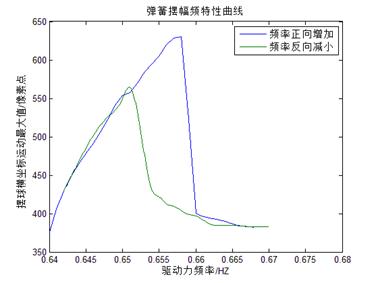
图十一 弹簧摆双稳态幅频特性曲线
由上图可知,在0.65-0.66频率段,频率正向调节和频率反向调节将分为两段,由此可以证明周期力驱动下的弹簧摆具有双稳态。
结论:1)在一定条件下,可以通过非惯性力的方式对不易直接施加驱动力的置施加周期性的驱动力
2)在幅值较大时,单摆的频率会幅值而变化
3)周期力驱动下的弹簧摆是非线性系统,一定参数条件下将出现明显的双稳态现象
项目创新与特色:
通过小车参考系所受的惯性力,作为弹簧摆的驱动力。使得弹簧摆的摆球可以获得周期性驱动力。并且可以通过调节驱动力的频率,观察到单摆、弹簧摆等系统在周期性驱动力下的行为。
制作成本(明细)(*论文类请在此列举参考文献):
轨道滑块一组
步进电机与步进电机驱动器一组
NI采集卡与摄像头
Labview相关组件与电脑
小球,细绳、弹簧若干